
2026年春节前夕,商汤绝影联合东风汽车推出行业首个生成式智驾量产方案,打破传统技术路径局限,实现技术先进性与量产可行性的双重突破。
随着技术的不断演进,智能驾驶正迈向以AGI为核心的智慧觉醒时代。市场对智驾的要求进一步提升,呼唤能真正理解人类意图、适应无限开放环境、并在交互中共同成长的出行伙伴。AI驱动的生成式智驾也同样不再遵循预设规则的剧本,而是基于对人、车、环境等世界元素的深度理解,实时生成驾驶行为的最优决策。
作为最专注于汽车行业的AI公司,商汤绝影始终将最前沿的人工智能技术与汽车产业深度融合,2022年发布了行业首个感知决策一体化的端到端智驾模型UniAD,并荣获CVPR 2023最佳论文;2024年底,发布行业标杆级别的开悟智能驾驶世界模型,并在全球知名增长咨询公司沙利文发布的《2025年中国世界模型发展白皮书》报告中,超越十余家中国世界模型领先玩家,实现中国第一,全球领先。2025年初,商汤绝影发布行业首个与世界模型协同交互的生成式智驾技术路线 R-UniAD,再度打造智能驾驶新路标。
商汤绝影与东风汽车历经一年的紧密协作,深度融合顶尖AI实力与头部车企量产研发底蕴,实现智驾研发新范式、世界模型、底层工具链构建等核心板块的自主研发与一体化整合。双方联合研发的生成式智驾量产方案将覆盖东风汽车多款车型,实现量产智驾体验全面升级,该合作更为东风构建了可持续进化的智驾技术基座,支撑其长期实现自主技术创新与系统能力迭代。
商汤绝影联合东风汽车以行业首个生成式智驾量产方案为起点,构建起全方位领先的智能化技术体系,依托领先的空间智能能力,实现舱驾一体的全域协同,拓展至多个智驾平台,打造面向L3和L4级的更高阶智驾能力和产品。未来,商汤绝影将助力东风汽车将持续深化AI驱动的技术架构与产品生态,不仅领航智能汽车新赛道,更推动中国汽车工业迈入以人为中心的AGI出行新时代。
生成式智驾量产方案定义新标杆,化身“博弈高手”
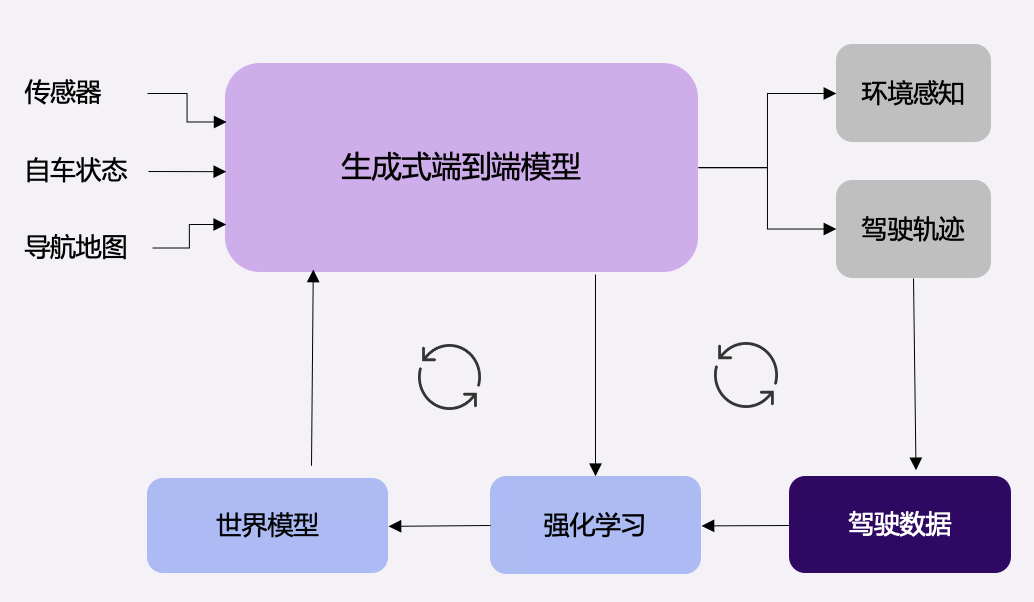
作为行业领先的生成式智驾量产方案,首次创新集成了一段式端到端架构、扩散生成式模型(Diffusion Model)以及“强化学习+开悟智驾世界模型”的训练算法:
一段式端到端架构赋予智驾“超级大脑”,全链整合能力实现更优决策效率与响应速度
扩散生成式模型(Diffusion Model)让智驾具备高阶自主博弈能力,从容应对复杂场景
强化学习+开悟智驾世界模型构建自我进化能力,使智驾越用越强大
一段式端到端架构将感知、规划、决策融为一体,确保无中间信息损失,使得智驾的反应速度与精度实现量级提升;扩散生成式模型(Diffusion Model)能在复杂驾驶场景中生成多种不同的行驶轨迹,最终形成最贴合实际驾驶需求的行为;强化学习+开悟智驾世界模型的黄金组合实现“边练边进化”,使得智驾彻底学习个人的驾驶偏好,适应复杂驾驶场景。
当前智驾行业的技术路径呈现明显分化,且均存在难以突破的短板,一类是二段式端到端架构,将感知与规划拆分为两个独立模块,模块间的信息传递存在天然损耗,不仅决策效率受限,更难以形成高效的问题闭环;另一类是基于模仿学习的智驾方案,仅能复刻已有的驾驶数据,面对突发长尾场景时极易“手足无措”。
商汤绝影联合东风汽车研发的行业首个生成式智驾量产方案规避了两类路径的缺陷,构建起领先的全栈能力体系,实现了行业性的技术跨越。
武汉因道路情况复杂、司机驾驶风格激进、交通参与者多样,被外界视为“博弈之城”,也是智驾的“魔鬼试炼场”。商汤绝影此次推出的生成式智驾量产方案在武汉如同本地司机般,懂博弈、能应变,精准适配武汉复杂路况,将复杂的路况博弈转化为用户可感知的从容与可靠。
一段式端到端架构赋予智驾“超级大脑”,全链整合能力实现更优决策效率与响应速度
试驾驶出隧道,光线骤明,隧道口车流密集、车速渐升,智驾系统无感知迟滞,精准捕捉各车道车流速度与间隙。通过系统规划,实现连续四次变道,精准把控时机,变道衔接丝滑,无顿挫稳稳驶入目标车道。

多车道灵活变道
一段式端到端架构作为方案的核心底座,将感知、规划、决策融为一体,如同为车辆装上了“超级大脑”,彻底颠覆了传统分段式架构的逻辑,使车辆能同时完成“看路况”和“做决策”两件事,没有中间环节的路况信息丢失,瞬间规划出最优路线,彻底告别“机器判断迟疑”带来的安全隐患,使得智驾的反应速度与精度实现量级提升。
扩散生成式模型(Diffusion Model)让智驾具备高阶自主博弈能力,从容应对复杂场景
高架桥下狭窄、不规则辅道,无车道线,右侧停放车辆,助动车与机动车交织混行,通行空间逼仄。面对混行乱流,生成式智驾展现了教科书级的毫厘之间穿行,实时预判,精准博弈,在移动的车隙与复杂的交通参与者之间丝滑穿行。

城区混行窄路连续博弈通行
面对相同的场景输入,传统模型通常依赖既定规则生成单一驾驶轨迹策略,而扩散生成式模型(Diffusion Model)能够生成多条可能的未来轨迹,选择相对最优的驾驶决策。
扩散生成式模型可显著缓解行车与泊车焦虑。这种高度拟人化的驾驶风格,大幅提升了乘坐的安全性与舒适性。
强化学习+开悟智驾世界模型构建自我进化能力,使智驾越用越强大
试驾行至武汉特色人车混杂大路口,行人穿梭、助动车随意切入机动车道、机动车伺机Cut-in,智驾系统面临极高挑战。智驾系统灵活避开右侧切入的助动车,精准把控与左侧车辆的车距,如本地司机般果断、快速通过路口。

密集人车混行路口通行
面对武汉这类极具本地特色的复杂交通生态,“强化学习+开悟智驾世界模型”的组合算法构建了一套持续进化的智能内核。开悟智驾世界模型构建出高拟真的“虚拟驾驶训练场”,能精准复刻并主动生成各类极端场景,预先积累应对经验。强化学习通过“奖惩机制”为智驾建立明确的行为价值评判体系,驱动系统不仅学会安全通行,更能结合复杂多变的路况,持续学习适配驾驶者的操作偏好与通行节奏,在一次次场景应对中自主优化决策逻辑,实现智驾能力的持续进化。
在每一次通行中,系统不仅持续进化,更在深度理解与默契配合中,演进为既懂路、更懂你的“可信赖共驾者”,让技术真正适配于人,守护每一程独有的从容与心安。
 分享到:
分享到:


 39160
39160